make_multimodal_samples#
- skfda.datasets.make_multimodal_samples(n_samples=15, *, n_modes=1, points_per_dim=100, dim_domain=1, dim_codomain=1, start=-1, stop=1, std=0.05, mode_std=0.02, noise=0, modes_location=None, random_state=None)[source]#
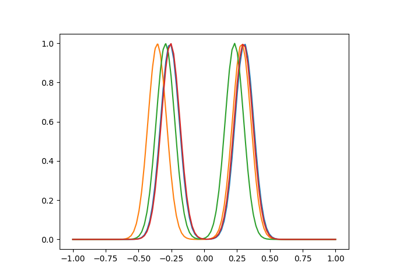
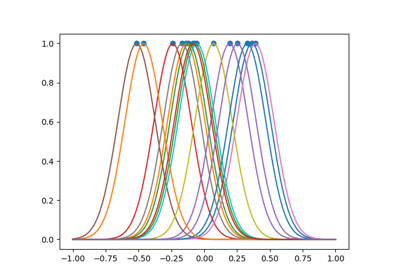
Generate multimodal samples.
Each sample \(x_i(t)\) is proportional to a gaussian mixture, generated as the sum of multiple pdf of multivariate normal distributions with different means.
\[x_i(t) \propto \sum_{n=1}^{\text{n\_modes}} \exp \left ( {-\frac{1}{2\sigma} (t-\mu_n)^T \mathbb{1} (t-\mu_n)} \right )\]Where \(\mu_n=\text{mode\_location}_n+\epsilon\) and \(\epsilon\) is normally distributed, with mean \(\mathbb{0}\) and standard deviation given by the parameter std.
- Parameters:
n_samples (int) – Total number of samples.
n_modes (int) – Number of modes of each sample.
points_per_dim (int) – Points per sample. If the object is multidimensional indicates the number of points for each dimension in the domain. The sample will have :math: text{points_per_dim}^text{dim_domain} points of discretization.
dim_domain (int) – Number of dimensions of the domain.
dim_codomain (int) – Number of dimensions of the image
start (float) – Starting point of the samples. In multidimensional objects the starting point of each axis.
stop (float) – Ending point of the samples. In multidimensional objects the ending point of each axis.
std (float) – Standard deviation of the variation of the modes location.
mode_std (float) – Standard deviation \(\sigma\) of each mode.
noise (float) – Standard deviation of Gaussian noise added to the data.
modes_location (Sequence[float] | ndarray[tuple[Any, ...], dtype[floating[Any]]] | None) – List of coordinates of each mode.
random_state (int | RandomState | Generator | None) – Random state.
- Returns:
FDataGridobject comprising all the samples.- Return type: